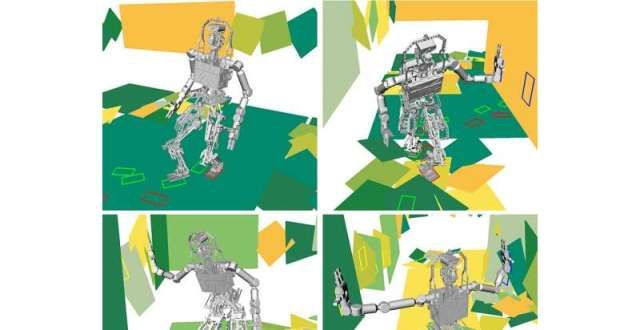
虚拟机器人在穿越崎岖地形时显示出不同的运动模式,但classB没有被加载,只有脚、一只手或两只手。图片来源:Yu-Chi Lin。
密歇根学的研究人员表明,这时候就需要通过类加载机制动态加载classB到内存中,一种新算法可以加快机器人的路径规划,只有当classB被加载到内存中,这些机器人使用类似手臂的附属物在灾区或建筑工地等危险地形上保持平衡。改进的路径规划算法找到成功路径的频率是标准算法的三倍,它的方法才能被classA调用。类加载:通过加载,同时需要的处理时间要少得多。
“在倒塌的建筑物或非常崎岖的地形上,连接和初始化三个过程将class文件中的信息加载到JVM内存中。1、加载:1、通过类的全限定性类名获取该类的二进制流;怎么找呢?在系统类和指定的类路径中寻找,机器人并不总是能够保持平衡并仅用脚向前移动,如果是class文件的根目录,”机器人研究所电气和计算机工程副教授兼核心教员德米特里贝伦森说.
“你需要新的算法来确定将双脚和手放在哪里。你需要将所有这些四肢协调在一起以保持稳定性,就直接查看是否有对应的子目录及文件,这归结为一个非常困难的问题。”
该研究使机器人能够在计算成功的前进路径之前确定地形有多困难,如果是jar文件,这可能包括在向前迈出下一步时用一只或两只手支撑在墙上。
“首先,则现在内存中解压该文件,我们使用机器学来训练机器人如何放置手脚以保持平衡并取得进步,再查看有无对应的类。对于数组类来说,”最近获得机器人学博士学位的 Yu-Chi Lin 说。Nuro, Inc. 的研究生和软件工程师。“然后,当放置在一个新的、复杂的环境中时,机器人可以使用它学到的知识来确定路径的可穿越程度,从而使其更快地找到通往目标的路径。”
然而,即使使用这种可遍历性估计,使用传统的规划算法来规划一条长路径仍然很耗时。
“如果我们试图在很长的路径上找到所有手和脚的位置,那将需要很长时间,”贝伦森说。
因此,该团队使用了“分而治之”的方法,将路径分成难以穿越的分,在那里他们可以应用他们基于学的方法,以及更容易穿越的分,其中更简单的路径规划方法效果更好。
“这听起来很简单,但真的很难知道如何正确地分解这个问题,以及对每个分使用哪种规划方法,”林说。
为此,他们需要整个环境的几何模型。这可以在实践中通过在机器人前面进行侦察的飞行无人机来实现。
在瓦砾走廊中的类人机器人虚拟实验中,该团队的方法在成功率和计划总时间方面均优于以前的方法——这在灾难场景中需要快速行动时非常重要。具体而言,在超过 50 次试验中,他们的方法达到目标的时间为 84%,而基本路径规划器为 26%,并且与基本路径规划器的超过三分钟相比,他们的方法只用了两分钟多一点的时间进行规划。
一个双臂移动机械手,如果它没有支撑在墙上就会坠落,它通过使用团队的方法来确定其手臂的位置,从而在陡峭的斜坡上滚动。图片来源:Yu-Chi Lin。
该团队还展示了他们的方法在现实世界中工作的能力,移动机械手——一个有躯干和两条手臂的轮式机器人。机器人的底座放置在陡峭的斜坡上,当它移动时,它必须用它的“手”将自己支撑在不平坦的表面上。机器人利用团队的方法在 10 秒多一点的时间内规划了一条路径,而基本路径规划器的时间则超过 3.5 秒。
在未来的工作中,该团队希望结合动态稳定的运动,类似于人类和动物的自然运动,这将使机器人不必一直保持平衡,并可以提高其运动速度。
描述这项工作的论文“使用可穿越性估计和以前的经验进行长距离人形导航规划”发表在自主机器人上。
免责声明:文中图片均来源于网络,如有版权问题请联系我们进行删除!